
OINS-050 型小光纤组合导航系统
- 实物样机

简介:采用50型光纤惯导系统,高精度双天线卫星接收机板卡,支持三频定位,具备定位、定向、定姿及自主导航性能。具备里程计、声学多普勒测速仪等辅助信息接入。定位定向精度如下表所示:
| 参数 | 模式 | 指标 |
| 位置精度 | 单点组合 | 1m(CEP) |
| DVL组合 | <0.5%D (D为航程) | |
| PPP模式 | 0.02m(CEP) | |
| 纯惯性 | 3nmile/h | |
| 速度精度 | 单点组合 | 0.1 m/s |
| PPP模式 | 0.01m/s(CEP) | |
| 航姿精度 | 俯仰角 | 0.02°(RMS) |
| 横滚角 | 0.02°(RMS) | |
| 航向角 | 0.1°(2m基线) | |
| 0.2° sec L(自寻北) |
电气特性及接口尺寸:
- 尺寸:146mm×98mm×75mm
- 重量:<1.5kg
- 功耗:小于10W,供电电压9V~36V
- 接口:1个PPS,1个EVENT,1个232,1个422
MINS-050 A/B型组合导航系统
- 实物样机
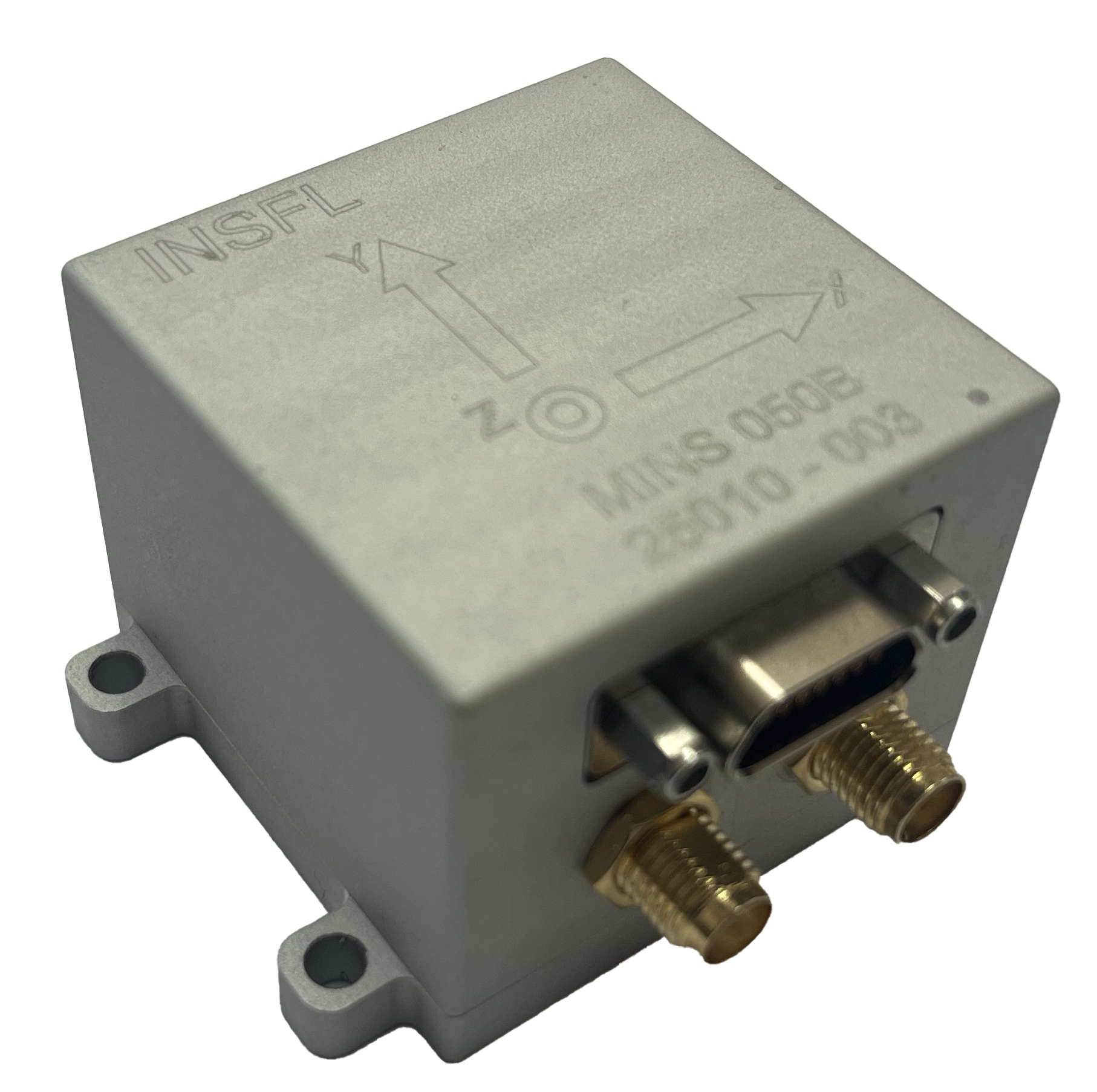
简介:采用高性能MEMS传感器,高精度双天线卫星接收机板卡,支持三频定位,具备定位、定向、定姿及自主导航性能。定位定向精度如下表所示:
| 参数 | 模式 | 指标 |
| 位置精度 | RTK模式 | 0.01m(CEP) |
| PPP模式 | 0.2m(CEP) | |
| 单点模式 | 1.5m(CEP) | |
| 速度精度 | RTK模式 | 0.01 m/s |
| PPP模式 | 0.02m/s(CEP) | |
| 单点模式 | 0.1 m/s | |
| 航姿精度 | 俯仰角 | 0.02°(RMS) |
| 横滚角 | 0.02°(RMS) | |
| 航向角 | 0.1°(2m基线) |
电气特性及接口尺寸:
- 尺寸:40mm×46mm×32mm
- 重量:75g
- 功耗:小于3W,供电电压3V~24V
- 接口:1个PPS,1个EVENT,1个232,1个422
MINS-010 型组合导航系统
- 实物样机

简介:MEMS传感器为ADIS16470,双天线板卡为司南K823,主控芯片为STM32H743VIT6。定位定向精度如下表所示:
| 参数 | 模式 | 指标 |
| 位置精度 | RTK模式 | 0.01m(CEP) |
| 单点模式 | 1.5m(CEP) | |
| 速度精度 | RTK模式 | 0.01 m/s |
| 单点模式 | 0.1 m/s | |
| 航姿精度 | 俯仰角 | 0.1°(RMS) |
| 横滚角 | 0.1°(RMS) | |
| 航向角 | 0.06°(2m基线) |
- 配套软件
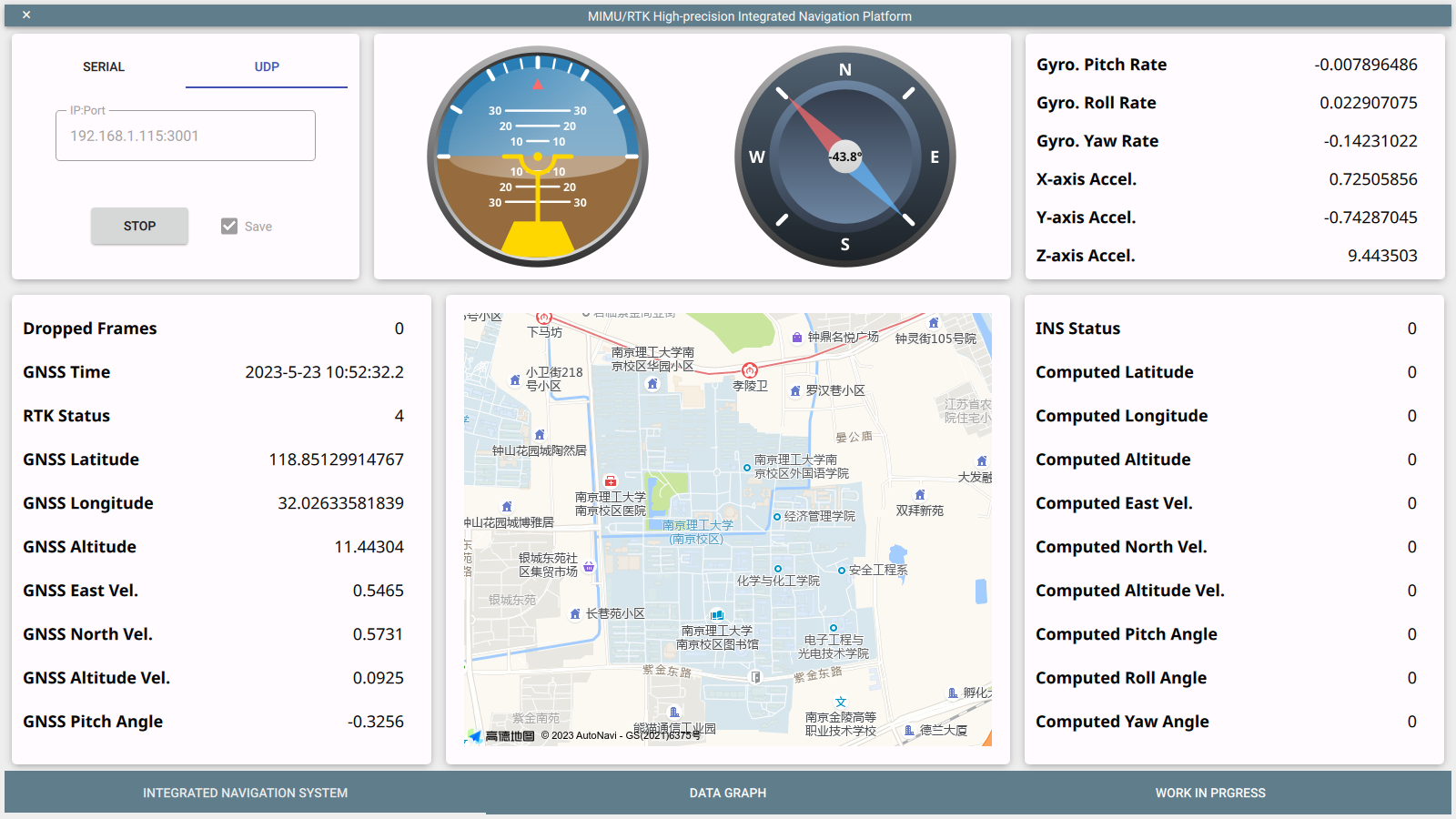
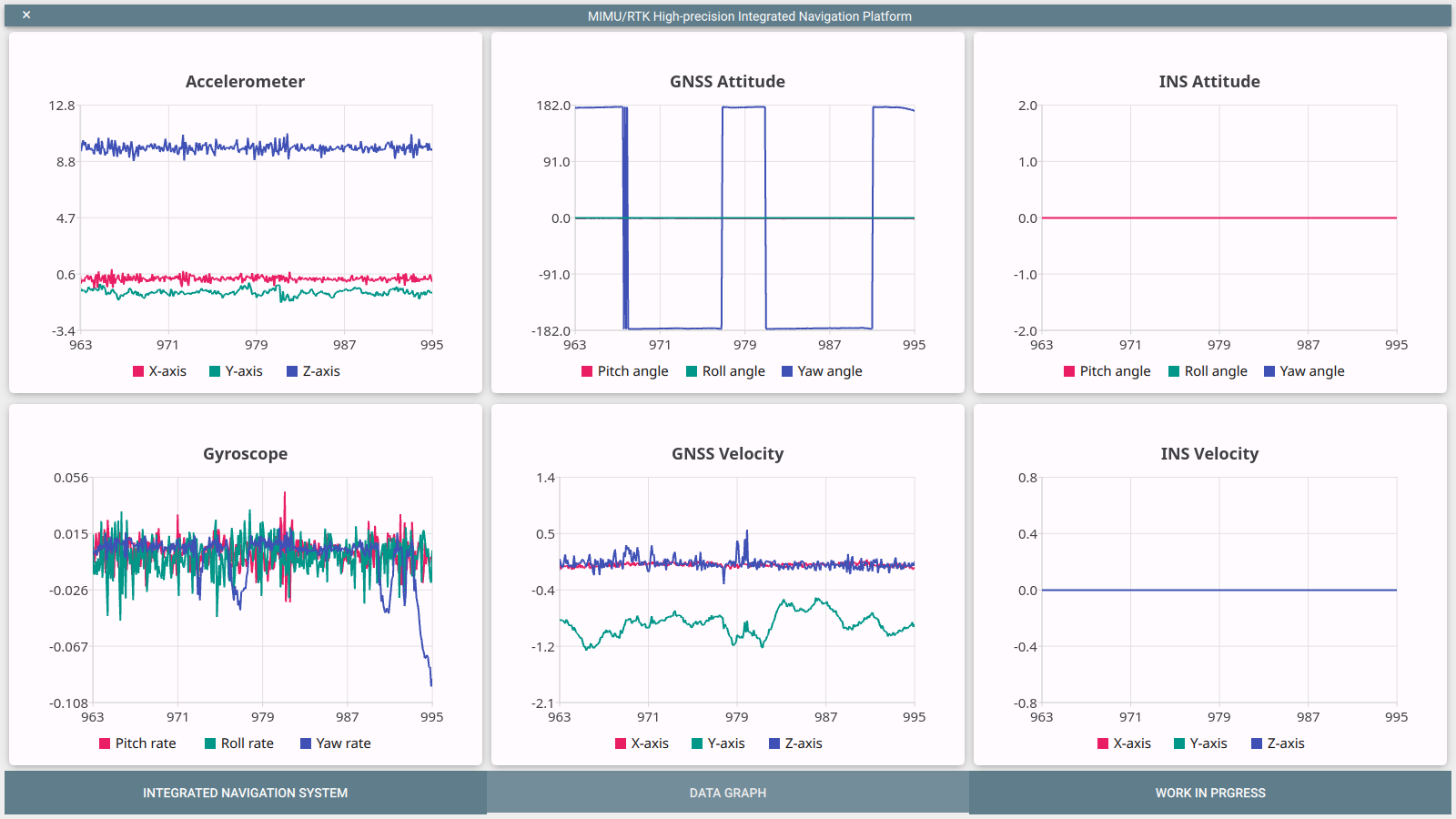
简介:可实现数据采集、存储、显示等功能。
CMP-100 型电子罗盘系统
- 实物样机
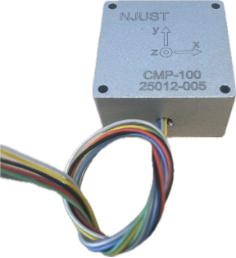
简介:MEMS IMU为ASM330,MEMS磁传感器RM3100,主控芯片为STM32F405RGT6。航姿精度如下表所示:
| 参数 | 模式 | 指标 |
| 航向角 | 测量范围 | 0~360° |
| 空间校准 | ≤0.1°(RMS)@水平 | |
| 水平校准 | ≤0.2°(RMS)@水平 | |
| 姿态角 | 测量范围 | -180~180° |
| 俯仰角 | ≤0.02°(RMS) | |
| 横滚角 | ≤0.02°(RMS) |
- 配套软件

简介:可实现数据采集、存储、显示等功能。
国产化电子罗盘系统
- 实物样机
简介:MEMS IMU均为自主可控器件设计,可实现三维姿态测量。航姿精度如下表所示:
| 参数 | 模式 | 指标 |
| 航向角 | 测量范围 | 0~360° |
| 空间校准 | ≤1.0°(RMS)@水平 | |
| 水平校准 | ≤0.5°(RMS)@水平 | |
| 姿态角 | 测量范围 | -180~180° |
| 俯仰角 | ≤0.1°(RMS) | |
| 横滚角 | ≤0.1°(RMS) |
- 配套软件
简介:可实现数据采集、存储、显示等功能。
阵列式微传感系统
- 32阵列九轴微惯性测量单元

简介:采用ICM20948进行阵列设计,可实现稳定性提升5倍,可输出陀螺仪、加速度计、磁强计数据,采样率1000Hz。
- 18阵列九轴微惯性测量单元
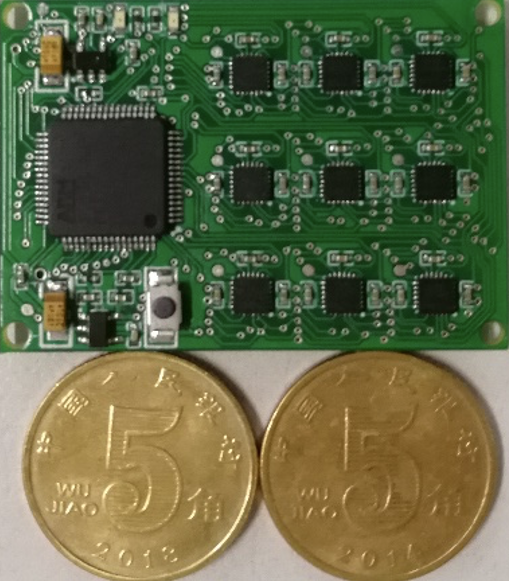
简介:采用ICM20948进行阵列设计,可实现稳定性提升4倍,可输出陀螺仪、加速度计、磁强计数据,采样率1000Hz。
- 8阵列九轴微惯性测量单元

简介:采用ICM20948进行阵列设计,可实现稳定性提升4倍,可输出陀螺仪、加速度计、磁强计数据,采样率1000Hz。
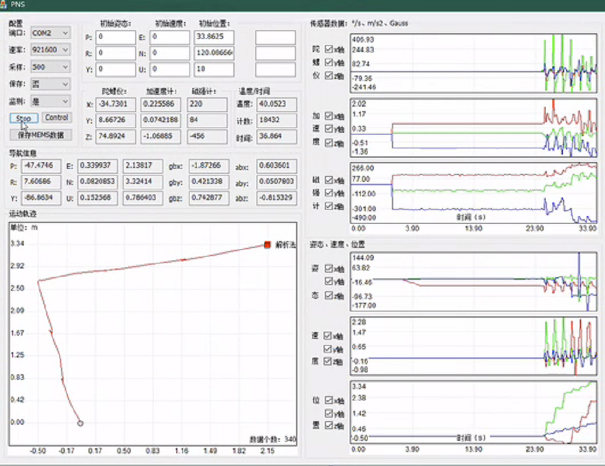
- 监测软件:

简介:可实现传感器数据采集与存储。
足绑式行人定位系统
- 双足测试样机:


简介:可实现室内自主定位,定位误差<0.5%D。
- 监测软件:
简介:可实现数据采集与定位显示。
微惯导组合导航系统
- 演示样机:
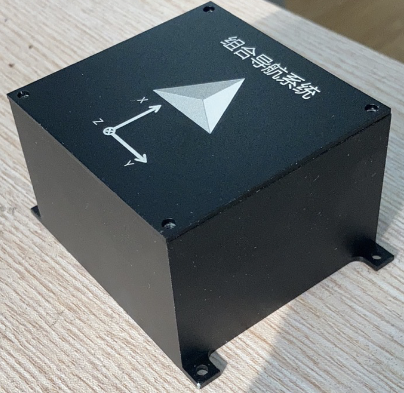

简介:可实现微惯导及GPS数据采集与导航计算。
- 监测软件:
简介:可实现数据采集与定位显示。
组合导航后处理软件

简介:可实现导航数据仿真,导航模拟,导航后处理等功能。
多源融合导航系统
……